
U prethodnoj temi&„Klasifikacija elektromotora &” objasnio sam različite tipove četkastog istosmjernog motora (BDC) koji kao na sljedećem dijagramu:

Danas ću objasniti slijedeći DC motor bez četkica (BLDC) i indukcijske motore naizmjenične struje.
Možete pregledati sljedeće povezane teme za pregled i dobar slijed.
Osnovne komponente električnih motora
2- DC motori bez četkica
|
DC motori bez četkica |

U istosmjernim motorima četkica, mehanički komutator i pripadajuće četke problematični su iz nekoliko razloga, kako slijedi:
Dolazi do trošenja četkica i dramatično se povećava u okruženju s niskim pritiskom.
Iskre iz četkica mogu izazvati eksplozije ako okolina sadrži eksplozivne materijale.
RF šum četkica može ometati televizore u blizini, elektroničke uređaje itd.
Motori jednosmjerne struje bez četkica (BLDC) su jedan od tipova motora koji brzo dobivaju popularnost. BLDC motori se koriste u industrijama kao što su aparati, automobilska industrija, vazduhoplovstvo, potrošačka, medicinska, oprema za industrijsku automatizaciju i instrumentacija.
Kao što naziv implicira, BLDC motori ne koriste četke za komutaciju; umjesto toga, oni se elektronički komutiraju.
BLDC motori imaju mnoge prednosti u odnosu na četkaste istosmjerne motore i indukcijske motore, a neke od njih su:
Bolja brzina u odnosu na karakteristike obrtnog momenta.
Visok dinamički odziv.
Visoka efikasnost.
Dug radni vek.
Rad bez buke.
Veći rasponi brzina.
Osim toga, omjer isporučenog obrtnog momenta prema veličini motora je veći, što ga čini korisnim u aplikacijama gdje su prostor i težina kritični faktori.
Građevinarstvo
BLDC motori su vrsta sinkronih motora. To znači da se magnetsko polje koje generira stator i magnetsko polje koje generira rotor okreću istom frekvencijom.
BLDC motori dolaze u jednofaznim, dvofaznim i trofaznim konfiguracijama. U skladu sa svojim tipom, stator ima isti broj namota. Od ovih, trofazni motori su najpopularniji i naširoko korišteni.
1- Stator
|
Stator BLDC motora |

Stator BLDC motora sastoji se od naslaganih čeličnih ploča sa namotima postavljenim u utore aksijalno izrezane duž unutrašnje periferije.
Većina BLDC motora ima tri namota statora spojena zvijezdama. Svaki od ovih namota konstruiran je s brojnim zavojnicama koje su međusobno povezane tako da tvore namot. Jedna ili više zavojnica postavljene su u utore i međusobno su povezane kako bi napravile namot. Svaki od ovih namota raspoređen je po obodu statora kako bi formirao paran broj polova.
Ovisno o mogućnostima upravljačkog napajanja, može se odabrati motor s ispravnim naponom statora. Motori s naponom od 48 volti ili manje koriste se u automobilskoj industriji, robotici, malim pokretima ruku itd. Motori sa naponom od 100 volti ili većim, koriste se u aparatima, automatizaciji i industrijskim aplikacijama.
2- Rotor
|
Rotor BLDC motora |

Rotor je izrađen od stalnog magneta i može varirati od dva do osam parova polova sa naizmjeničnim sjevernim (N) i južnim (S) polom.
|
Položaji magneta rotora BLDC |
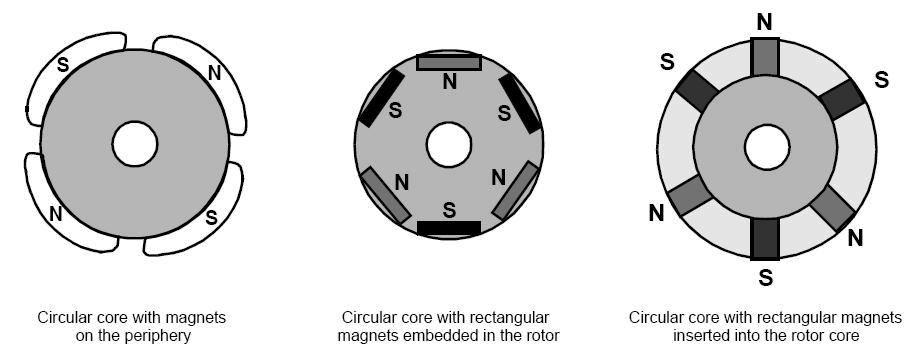
Na temelju potrebne gustoće magnetskog polja u rotoru, odabire se odgovarajući magnetski materijal za izradu rotora. Feritni magneti se tradicionalno koriste za izradu trajnih magneta.
3- Hall senzori
|
BLDC Hall senzori |
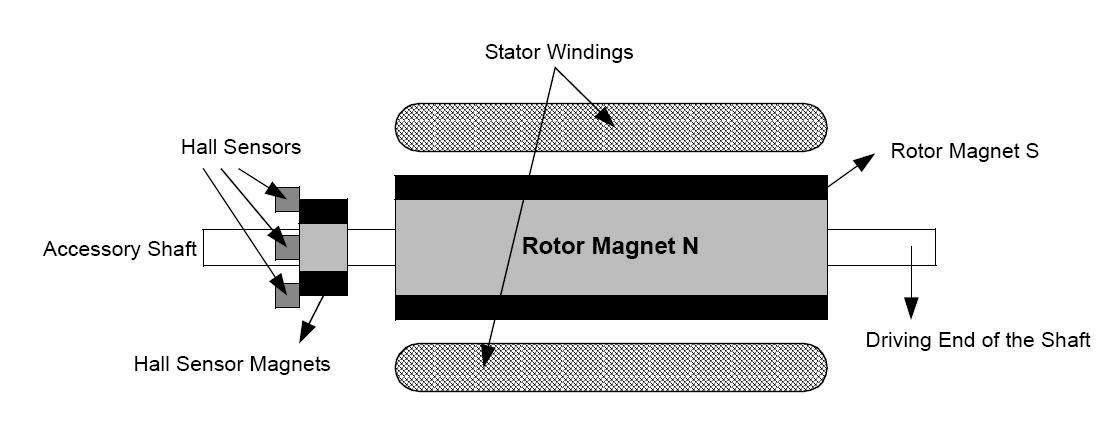
Za razliku od četkastog istosmjernog motora, komutacija BLDC motora kontrolira se elektronički. Za rotiranje BLDC motora, namote statora treba napajati u nizu. Važno je znati položaj rotora da biste razumjeli koji će namot biti pod naponom nakon slijeda uključivanja. Položaj rotora se mjeri pomoću Hall Effect senzora ugrađenih u stator.
Većina BLDC motora ima tri Hall senzora ugrađena u stator na kraju motora koji se ne pokreće.
Kad god magnetski polovi rotora prolaze blizu Hall -ovih senzora, oni daju visoki ili niski signal, ukazujući da N ili S pol prolazi blizu senzora. Na osnovu kombinacije ova tri signala Hall senzora, može se odrediti tačan slijed komutacije.
Na osnovu fizičkog položaja Hall senzora, postoje dvije verzije izlaza. Hall senzori mogu imati fazni pomak 60 ° ili 120 ° jedan prema drugom. Na temelju toga proizvođač motora definira redoslijed komutacije koji se treba pridržavati pri upravljanju motorom.
Napomena: Hall -ovim senzorima je potrebno napajanje. Napon može varirati od 4 do 24 volta. Potrebna struja može biti u rasponu od 5 do 15 zaušnjaka.
Teorija rada
Svaki niz komutacija ima jedan od namotaja koji su napajani na pozitivnu snagu (struja ulazi u namot), drugi namot je negativan (struja izlazi iz namota), a treći je u stanju bez napona.
Okretni moment nastaje zbog interakcije između magnetskog polja koje stvaraju zavojnice statora i stalnih magneta rotora.
Kako bi motor ostao u pogonu, magnetsko polje koje stvaraju namoti treba se pomaknuti, dok se rotor pomiče kako bi sustigao polje statora. Ono što je poznato kao "Komutacija u šest koraka" definira slijed uključivanja namota.
U komutaciji u šest koraka, istovremeno se koriste samo dva od tri namotaja DC motora bez četkica. Koraci su ekvivalentni 60 električnih stupnjeva, pa šest koraka čini potpunu rotaciju za 360 stupnjeva. Jedna puna petlja od 360 stepeni može kontrolirati struju jer postoji samo jedna putanja struje. Komutacija u šest koraka obično je korisna u aplikacijama koje zahtijevaju velike brzine i frekvencije komutacije. Jednosmjerni motor bez četkica bez četkica obično ima manju efikasnost zakretnog momenta od motora s sinusnim valom.
Tipične aplikacije motora BLDC
Vrstu upravljanja BLDC motorom možemo kategorizirati u tri glavne vrste:
Konstantno opterećenje.
Različita opterećenja.
Aplikacije za pozicioniranje.
1- Aplikacije sa stalnim opterećenjem:
To su tipovi aplikacija u kojima je promjenjiva brzina važnija od održavanja tačnosti brzine na zadanoj brzini. Osim toga, stope ubrzanja i usporavanja se ne mijenjaju dinamički. U ovim vrstama aplikacija, opterećenje je direktno povezano s osovinom motora.
Na primjer, ventilatori, pumpe i duvaljke spadaju u ovu vrstu primjene. Ove aplikacije zahtijevaju jeftine kontrolere, koji uglavnom rade u otvorenoj petlji.
2- Primjene s različitim opterećenjima:
Ovo su vrste aplikacija u kojima opterećenje motora varira u rasponu brzina. Ove aplikacije mogu zahtijevati preciznost upravljanja velikom brzinom i dobre dinamičke odzive.
Na primjer,
Kućanski aparati: perilice, sušilice i kompresori.
U automobilskoj industriji, upravljanje pumpom za gorivo, elektronsko upravljanje, upravljanje motorom i upravljanje električnim vozilom.
U vazduhoplovstvu postoji nekoliko aplikacija, poput centrifuga, pumpi, robotskih komandi, žiroskopa itd.
Ove aplikacije mogu koristiti uređaje za povratnu informaciju o brzini i mogu raditi u poluzatvorenoj ili potpuno zatvorenoj petlji.
3- Aplikacije za pozicioniranje:
Većina industrijskih i automatizacijskih aplikacija spada u ovu kategoriju. Aplikacije u ovoj kategoriji imaju neku vrstu prijenosa snage, koja bi mogla biti mehanički zupčanici ili vremenski remeni, ili jednostavan sistem s pogonom na remen. U tim su aplikacijama važni dinamički odziv brzine i zakretnog momenta. Također, ove aplikacije mogu imati često mijenjanje smjera rotacije.
Ovi sistemi uglavnom rade u zatvorenoj petlji.
Konačno, poređenje između jednosmernog jednosmernog motora (BDC) i motora bez četkica (BLDC) je prikazano na slici ispod.

Drugo: Motori naizmjenične struje
Motori naizmjenične struje (AC) koriste električnu struju koja mijenja smjer u pravilnim intervalima.
Glavna prednost istosmjernih motora u odnosu na motore naizmjenične struje je ta što je za motore naizmjenične struje teže kontrolirati brzinu. Kako bi se to kompenziralo, AC motori mogu biti opremljeni pogonima promjenjive frekvencije, ali poboljšana kontrola brzine dolazi zajedno sa smanjenom kvalitetom energije.
Vrste AC motora:

Motori naizmjenične struje koji se danas uobičajeno mogu podijeliti u dvije široke kategorije:
Asinkroni (asinhroni) motori.
Sinhroni motori.
Linearni motori.
Ove dvije vrste motora razlikuju se po načinu napajanja polja rotora na sljedeći način:
Za indukcijske motore ne postoji eksterno primijenjena pobuda rotora, a umjesto toga se u namote rotora dovodi struja zbog magnetskog polja rotirajućeg statora.
Za sinkrone motore, na namote rotora primjenjuje se uzbuda polja. Ova razlika u uzbudi polja dovodi do razlika u karakteristikama motora, što dovodi do različitih zahtjeva zaštite i upravljanja za svaki tip motora.
1- Indukcijski motor
Asinhroni motori su najčešći motori koji se koriste za raznu opremu u industriji.
Indukcijski motor: Tako se naziva jer se u rotoru inducira napon (stoga nema potrebe za četkama), ali da bi se to dogodilo, rotor mora rotirati manjom brzinom magnetsko polje kako bi se omogućilo postojanje induciranog napona.
Stoga je potreban novi pojam za opisivanje asinhronog motora koji je klizni.
Klizanje:
Pogonski moment može postojati samo ako u zasenčenom prstenu postoji inducirana struja. Određuje ga struja u prstenu i može postojati samo ako postoji promjena fluksa u prstenu. Stoga mora postojati razlika u brzini u zasenčenom prstenu i rotirajućem polju. Zbog toga se elektromotor koji radi na gore opisanom principu naziva „asinhroni motor“.
Razlika između sinkrone brzine (Ns) i brzine prstena za zasjenjivanje (N) naziva se "klizanje" (s) i izražava se kao postotak sinkrone brzine.
S=(Nsyn - Nm)/ Nsyn
Gdje je slip? Klizanje je jedna od najvažnijih varijabli u upravljanju i radu indukcijskih strojeva.
s=0: ako rotor radi sinkronom brzinom.
s=1: ako rotor miruje.
s je –ve: ako rotor radi brzinom većom od sinkrone.
s je + ve: ako rotor radi brzinom manjom od sinhrone.
Prednosti:
Jednostavan dizajn, robustan, niske cijene, lako održavanje.
Širok raspon nazivnih snaga: frakcijske konjske snage do 10 MW.
U osnovi radite konstantnom brzinom od praznog hoda do punog opterećenja.
Njegova brzina ovisi o frekvenciji izvora napajanja.
Najpopularniji motor danas u rasponu malih i srednjih konjskih snaga.
Vrlo robustan u izgradnji.
Zamijenili su istosmjerne motore u područjima gdje se tradicionalni istosmjerni motori ne mogu koristiti, kao što su rudarska ili eksplozivna okruženja. Dva tipa, ovisno o konstrukciji motora; Kavez za vjeverice ili klizni prsten.
Nedostaci:
Nije lako imati promjenjivu kontrolu brzine.
Zahtijeva energetski elektronički pogon promjenjive frekvencije za optimalnu kontrolu brzine.
Većina njih radi s faktorom snage koji zaostaje.
Princip rada:
Stator je obično spojen na mrežu, pa je stator magnetiziran.
Magnetsko polje statora siječe namote rotora i proizvodi inducirani napon u namotima rotora.
Budući da su namoti rotora kratko spojeni, i za kavez vjeverice i za namotani rotor, te za inducirane struje u namotima rotora.
Struja rotora proizvodi još jedno magnetsko polje.
Okretni moment nastaje kao rezultat interakcije ta dva magnetska polja.
Konstrukcija:
Asinhroni motor ima dva glavna dijela
1- Stator
|
Stator indukcijskog motora |

Ovo je nepokretni dio motora. Na tijelu od lijevanog željeza ili lake legure nalazi se prsten od tankih silikonskih čeličnih ploča (debljine oko 0,5 mm). Ploče su međusobno izolirane oksidacijom ili izolacijskim lakom. "Laminacija" magnetskog kruga smanjuje gubitke histerezom i vrtložnim strujama.
Ploče imaju ureze za namote statora koji će proizvesti rotirajuće polje za uklapanje (tri namota za trofazni motor). Svaki namot sastoji se od nekoliko zavojnica. Način spajanja zavojnica određuje broj parova polova na motoru, a time i brzinu rotacije.
2- Rotor
Ovo je mobilni dio motora. Poput magnetskog kruga statora, sastoji se od naslaganih ploča međusobno izoliranih i tvore cilindar pričvršćen na osovinu motora.
Vrste asinhronih motora
|
Vrste asinhronih motora |

Asinhroni motori su prema tipu rotora klasificirani na sljedeći način:
A- Rotor s kaveznim kavezom:

|
Rotor sa kavezom |

Sastoji se od debelih provodnih šipki ugrađenih u paralelne proreze. Ove šipke su kratko spojene na oba kraja pomoću prstenova s kratkim spojem.
B- Rotor rane:

|
Rotor za rane |

Ima trofazni, dvoslojni, raspodijeljeni namot. Namotan je za onoliko polova koliko i stator. Tri faze su ožičene iznutra, a drugi su krajevi spojeni na klizne prstenove montirane na osovini s četkama naslonjenim na njih.
Svaka od dvije gore navedene vrste indukcijskih motora može se klasificirati u dvije glavne grupe, kako slijedi:
I- Jednofazni indukcijski motori:
Oni imaju samo jedan namot statora, rade s jednofaznim napajanjem, imaju rotor u kaveznom veveru i zahtijevaju uređaj za pokretanje motora. Ovo je daleko najčešći tip motora koji se koristi u kućanskim aparatima, poput ventilatora, mašina za pranje rublja i sušilica rublja, te za aplikacije do 3 do 4 konjske snage.
Jednofazni indukcijski motori također dolaze s namotanim rotorom koji ima izvrsne karakteristike pokretanja i ubrzanja, a idealni su za operatore vrijednosti, primjene na motorima u poljoprivredi, dizalice, strojeve za održavanje podova, kompresore za zrak, opremu za pranje rublja i rudarsku opremu.
II- Trofazni asinhroni motori:
Rotirajuće magnetsko polje proizvodi uravnoteženo trofazno napajanje. Ovi motori imaju velike mogućnosti snage, mogu imati kavezne ili rotorske rotore (iako 90% ima rotor kaveznog kaveza), te se sami pokreću. Procjenjuje se da je oko 70% motora u industriji ovog tipa, koji se koriste, na primjer, u pumpama, kompresorima, transportnim trakama, teškim električnim mrežama i brusilicama. Dostupni su u ocjenama od 1/3 do stotine konjskih snaga.
Pogledajmo sada prvu klasifikaciju asinhronih motora na temelju gore navedenih tipova:
1- Jednofazni, kavez vjeverice, indukcijski motor:
Ova kategorija ima mnogo vrsta kako je prikazano na donjoj slici.

A-inducirani motori sa zasjenom
Princip konstrukcije i rada:
|
Indukcijski motori u sjeni |

Motori sa zasjenom imaju samo jedan glavni namot i nemaju namotavanje za početak. Pokretanje se koristi dizajnom koji zvoni kontinuiranom bakrenom petljom oko malog dijela svakog od stupova motora. Ovo "zasjenjuje" taj dio pola, uzrokujući da magnetsko polje u zasjenjenom području zaostaje za poljem u nezasenčenom području. Reakcijom dva polja vratilo se okreće.
Prednosti:
Budući da zasjenjenom pol motoru nedostaje startno namotavanje, startni prekidač ili kondenzator, električno je jednostavan i jeftin.
Brzina se može kontrolirati samo promjenom napona ili namotom s više dodira.
Mehanički, konstrukcija zasjenjenog pola omogućava veliku proizvodnju.
Obično se smatraju motorima za jednokratnu upotrebu, što znači da ih je mnogo jeftinije zamijeniti nego popraviti.
Nedostaci:
Njegov mali zakretni moment obično iznosi 25% do 75% nazivnog momenta.
To je motor velikog klizanja sa radnom brzinom od 7% do 10% ispod sinhrone brzine.
Općenito, efikasnost ovog tipa motora je vrlo niska (ispod 20%).
Prijave:
Niski početni troškovi odgovaraju motorima sa zasjenjenim stupovima za primjene sa malim konjskim snagama ili laganim opterećenjima. Možda im je najveća upotreba u višebrzinskim ventilatorima za kućnu upotrebu. No, niski okretni moment, niska efikasnost i manje čvrste mehaničke karakteristike čine zasjenjene motore nepraktičnim za većinu industrijske ili komercijalne upotrebe, gdje su norme veća brzina ciklusa ili kontinuirana radna snaga.
U sljedećoj temi nastavit ću objašnjavati druge tipove jednofaznih indukcijskih motora s kaveznim kavezom. Stoga vas molimo da slijedite sljedeće.





